

01
background
背景
海の開発と保全を両立し、持続可能な未来を実現する
海は地球の表面積の7割を占め、さらに地球上で最大の生態系があり、人類をはじめとする生物の生命を維持する上で不可欠な要素です。
人類は水産業や海運、洋上風力発電等の再生可能エネルギーに関わる事業をはじめ、様々な形で海を活用してきました。また、大気と海は不可分に繋がっており、近年問題となっている気候変動にも大きく関与しています。
このような背景から、私たちは良好な海洋環境が保全されることが人類の存続の基盤であり、かつ海洋の健全な活用が人類の発展の基盤の一つであると考えます。
海洋の開発および利用、保全等が適切に行われるためには、海洋に関する科学的知見が不可欠である一方で、海はまだ科学的に解明されていない事が多い領域です。
そこで私たちは海を科学的に解明することを通して、海洋と人類の共生に貢献し、持続可能な未来を実現することを目的とします。

02
strengths
技術アセットと自社の強み
1, 水中IoTモニタリングシステム MizLinx Monitor
海洋IoTモニタリングシステム
カメラにより、高画質な映像・画像が取得でき、各種センサも柔軟に組み込み可能です。ハードウェア・ソフトウェアを一気通貫で開発可能であり、カスタマイズのご要望もお受けしております。
MizLinx Monitor 紹介動画

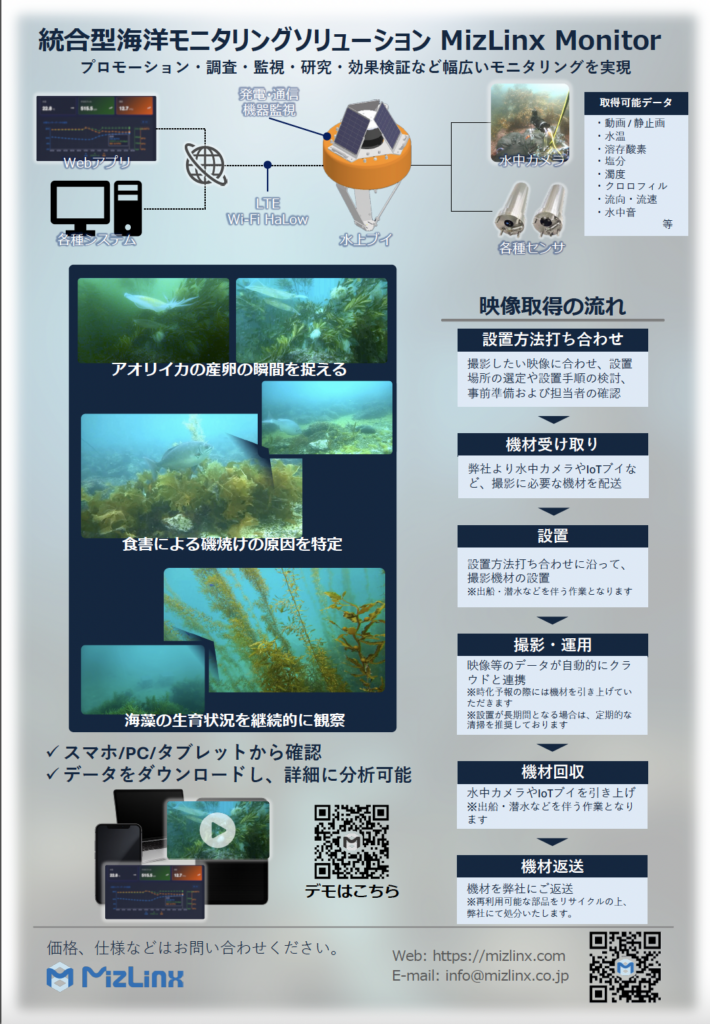
- MizLinx Monitorで取得可能なデータ:動画・静止画、水温、溶存酸素、塩分、濁度、クロロフィル、流向・流速、水中音など
- 表示方法:Webアプリ(スマホ、PC、タブレットなど任意のデバイスで表示可能)
- 通信:LTE / Wi-Fi HaLow
Webアプリ画面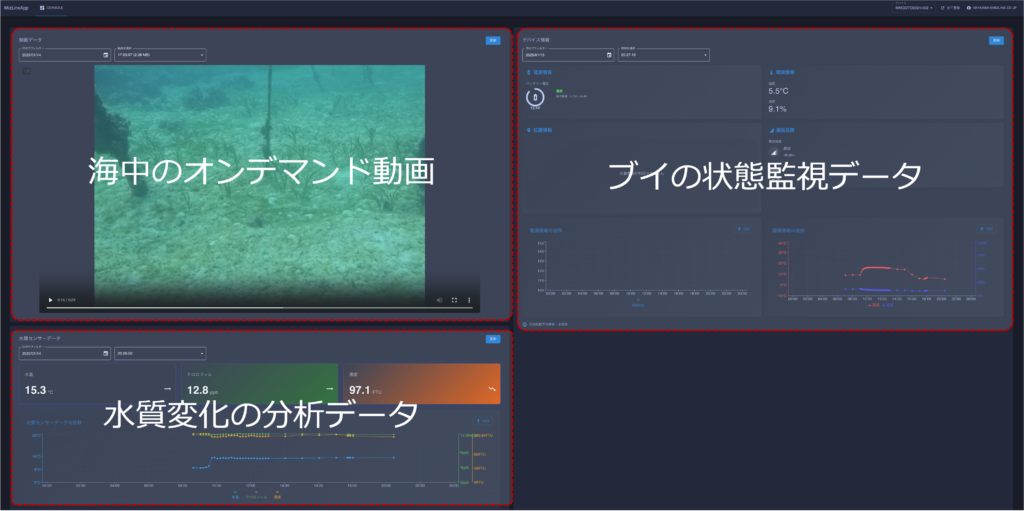
Webアプリ デモページ:https://demo.console.mizlinx.com/
MizLinx Monitor Wi-Fi HaLow オプション

アオリイカ産卵床モニタリング
藻場食害監視
テレビ東京 ブルードリーム 海と森の守り人たち(2025/12/14放送)37:49〜
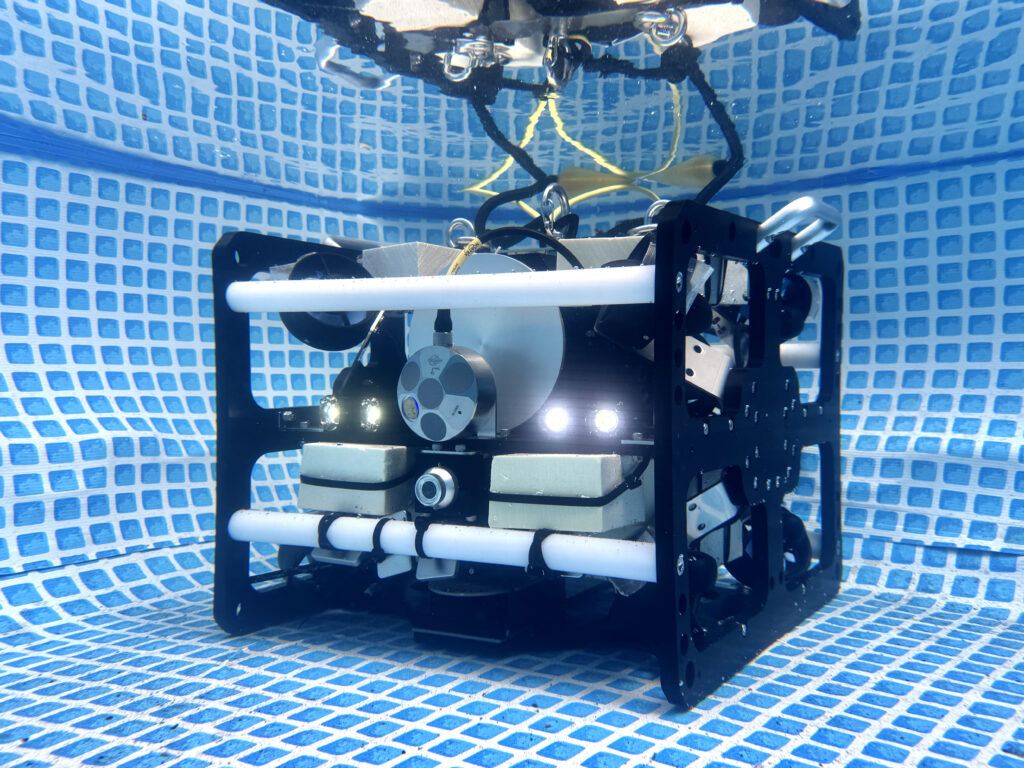
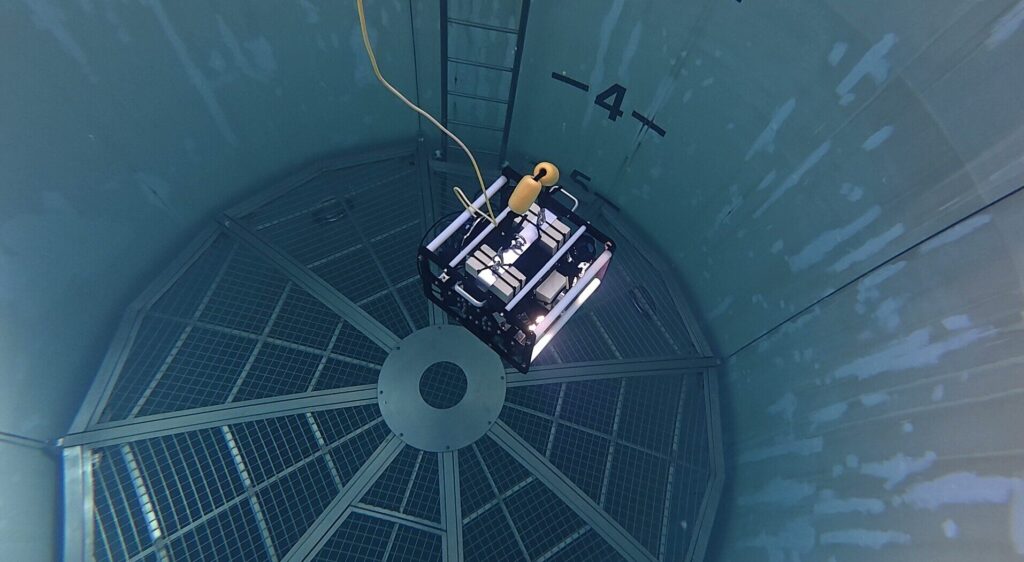
2, 水中ドローン MizLinx UUV (自律型 水中ロボット)
船底検査用のUUV(Unmanned Underwater Vehicle: 水中ドローン (水中ロボット))を開発しています。
特徴
- 全姿勢点検:10基のスラスタと最適化した浮力・重力中心設計により、360°あらゆる姿勢で安定した点検を実現。
- 相対測位:船体に対する相対位置を推定し、狭所で信頼性が低下するUSBLに依存しない測位を実現。
- 拡張性の高い設計:ハードウェアに依存しないソフトウェアアーキテクチャにより、大型船舶へ容易に展開可能。

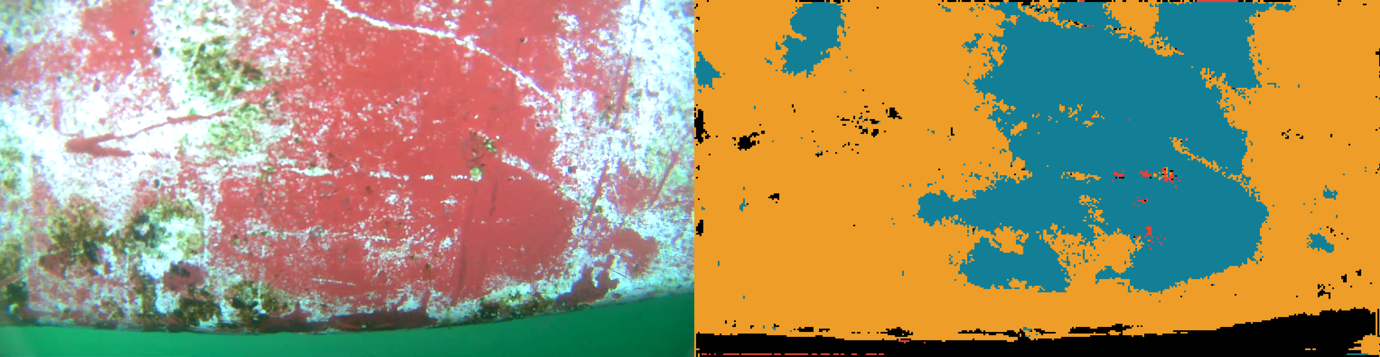 左:元画像 右:検出結果(生物付着・塗装剥離・鉄板・サビ)
左:元画像 右:検出結果(生物付着・塗装剥離・鉄板・サビ)
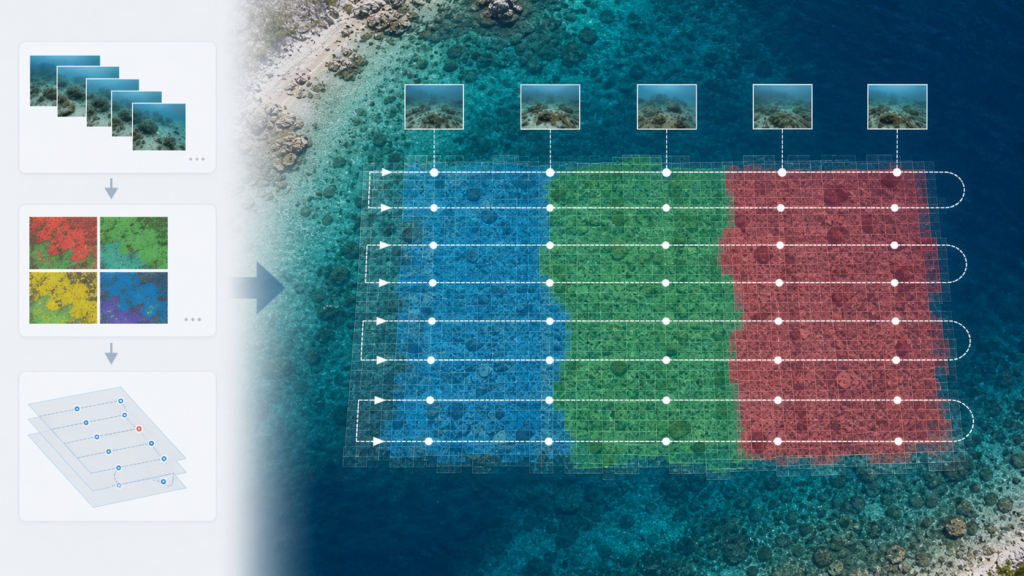
3, 水中撮影用カメラ・AI解析ツール MizLinx Diver
MizLinx Diverは、水中映像の取得から可視化・解析まで対応する水中調査パッケージです。
水中環境を効率的に記録し、位置情報との連携やAI解析により、調査目的に応じたデータの可視化・マップ化を行います。撮影のみの調査からAI解析・レポート作成まで、現場ニーズに応じて柔軟に対応します。
例:水中撮影、生物調査、海ごみ調査、港湾・漁港調査

MizLinx Diver 紹介動画
4, 受託開発・コンサルティング・共同研究
水中IoT技術、水中ロボティクス技術、データ解析技術の知見を活用した各種コンサルティング、システム開発、共同研究等を承っております。
実績:国立研究開発法人、大学、民間企業
5, 採用情報
採用強化中です!
03
case study
導入事例
支援実績
静岡県沼津市
静岡県唯一の海面養殖である
沼津内浦地区養殖マアジの
大量へい死問題の調査及び
解決策の策定
詳細
香川県東かがわ市
データ連携を活用した
スマート水産業「牡蠣養殖」の
試験養殖の検証
詳細(p.7)
長崎県五島市(1)
水中モニタリングシステムと洋上IoT/AIプラットフォームによる「海の見える化」で水産業の総生産向上による持続可能な漁業の実現に向けた取り組み
詳細(YouTube)
長崎県五島市(2)
電波延伸のための新型通信専用ブイを用いた洋上通信システム構築による離島沿岸DXの推進
詳細(YouTube)
Team
チーム紹介
野城 菜帆
Naho Yashiro
代表取締役CEO
1996年千葉県生まれ。2022年慶應義塾大学大学院理工学研究科修士課程修了。2021年8月、大学院在学中に株式会社MizLinxを設立、代表取締役に就任。(独)情報処理推進機構(IPA) 2021 年度未踏アドバンスト事業採択。Forbes JAPAN 30 UNDER 30 2023受賞。2025年東京大学大学院新領域創成科学研究科博士課程入学、在学中。日本成長戦略会議 海洋WG構成員。

石川 空
Sora Ishikawa
取締役
慶應義塾大学大学院理工学研究科修了。身体支援技術の世界大会「サイバスロン2022電動車いす部門」にて3位入賞。在学中は次世代モビリティのプロダクト開発・オペレーションに従事すると共に株式会社MizLinxのプロダクト開発・製造サポートを担当。大学院修了後、医療・ヘルスケア系IT企業に入社し製薬企業向けマーケティング支援に従事したのち、2024年よりMizLinxにジョイン。慶應義塾大学理工学研究科博士課程在学中。

嶋田 恭大
Kyota Shimada
エンジニア
慶應義塾大学大学院理工学研究科博士2年。
大学では水流の流速センサの開発に取り組んでいる。MizLinxでは主にハードウェア開発およびセンサ評価を担当。

井上 智誠
Tomonari Inoue
エンジニア
慶應義塾大学環境情報学部3年。MAKERS UNIVERSITY U-18第7期生採択、福島良典奨学生、佐俣アンリ奨学生。ロボカップジュニアジャパンオープン サッカーオープンリーグ2024にて4位獲得、審査員特別賞受賞、日本ロボット学会「RSJ賞」受賞。株式会社REAF創業メンバー。ARES Projectではチームとして火星探査機の開発を進めるほか、大学の研究会では自動運転の研究に従事。MizLinxでは主にAI・ロボティクス分野における研究開発を担当。
Note更新中です

News
ニュース
more...
Program
受賞歴
未踏アドバンスト
2021.7 採択
NEDO Entrepreneurs Program(NEP)
2022.8 NEPタイプB採択

東京都ベンチャー技術大賞
2023.11 特別賞・女性活躍推進知事特別賞受賞

(国研)農研機構
2024.7 スタートアップ総合支援プログラム
総務省
2024.8 地域デジタル基盤活用推進事業

総務省
2025.4 地域社会DX推進パッケージ事業
(地独)東京都立産業技術研究センター
2025.9 クラウドと連携した5G・IoT・ロボット製品開発等支援事業

Company
会社情報

会社名
株式会社MizLinx(ミズリンクス)
代表者
野城 菜帆
所在地
【本社】
〒116-0003
東京都荒川区南千住8丁目5番7号白鬚西R&Dセンター216号室
【開発・製造拠点】
〒116-0003
東京都荒川区南千住8丁目5番7号白鬚西共同利用工場115号室
【開発拠点】
〒135-0064
東京都江東区青海2-4-10 東京都立産業技術研究センター 製品開発支援ラボ313号室
設立日
2021年8月18日
事業内容
海洋観測システムの開発・販売 / 海洋データ分析支援 / 海洋コンサルティング / 水中ドローン(水中ロボット)開発
電気通信事業者 届出番号 A-05-20969
Access
アクセス
本社
〒116-0003
東京都荒川区南千住8丁目5番7号白鬚西R&Dセンター216号室
https://maps.app.goo.gl/WfdhZEDU4zLNknLE6
電車:JR常磐線/東京メトロ日比谷線/つくばエクスプレス 南千住駅 徒歩15分、バス5分(南千住駅東口 3番乗り場から 上46 上野松坂屋前行きをご利用いただき、「南千住汐入」でお降りください。)
※南千住駅はタクシー不在のことが多いです。
車:施設内の高さ制限は2.7m、一方通行です。入口は建物の東側にございます。2階までお上がりいただき、216号室の前まで直接お車でお越しください。216号室の前に駐車可能です。



